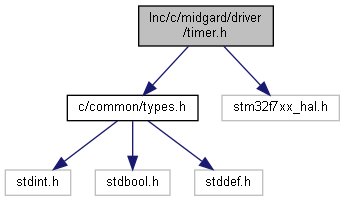
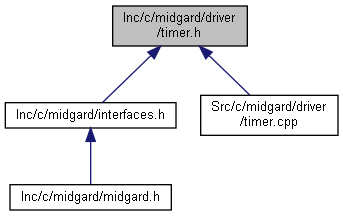
Timer abstraction implementation for Midgard. More...
Go to the source code of this file.
Classes | |
| struct | tim_t |
| Timer handle type. More... | |
| struct | tim_channel_t |
| Timer channel handle type. More... | |
Enumerations | |
| enum | EncoderDirection { EncoderDirection_Clockwise, EncoderDirection_CounterClockwise } |
| Last known turning direction of the encoder. More... | |
| enum | EncoderMode { EncoderMode_48StepsPerTurn, EncoderMode_96StepsPerTurn } |
| Modes for the encoder, 48 odr 96 steps per turn are possible. More... | |
Detailed Description
Timer abstraction implementation for Midgard.
Enumeration Type Documentation
◆ EncoderDirection
| enum EncoderDirection |
◆ EncoderMode
| enum EncoderMode |
Function Documentation
◆ yggdrasil_Encoder_Disable()
Disable the encoder mode.
- Note
- This does only work for timer with a encoder modul
- Parameters
-
tim Timer handle
- Returns
- Success
◆ yggdrasil_Encoder_Enable()
Enable the encoder mode.
- Note
- This does only work for timer with a encoder modul
- Parameters
-
tim Timer handle
- Returns
- Success
◆ yggdrasil_Encoder_GetCount()
Get the counter value.
- Note
- This does only work for timer with a encoder modul
- Parameters
-
tim Timer handle
- Returns
- Actual timer count
◆ yggdrasil_Encoder_GetDirection()
| C_LINKAGE enum EncoderDirection yggdrasil_Encoder_GetDirection | ( | tim_t | tim | ) |
Get the direction of the last rotation.
- Note
- This bit might not be accurate while turning the encoder
- Parameters
-
tim Timer handle
- Returns
- Direction
◆ yggdrasil_Encoder_Init()
Initialization function for the encoder.
- Note
- Default encoder mode is 96 steps per turn
- Parameters
-
tim Timer handle
- Returns
- Success
◆ yggdrasil_Encoder_SetCount()
Set the encoder counter value.
- Parameters
-
tim Timer handle cnt New counter value
◆ yggdrasil_Encoder_SetMode()
| C_LINKAGE void yggdrasil_Encoder_SetMode | ( | tim_t | tim, |
| enum EncoderMode | mode | ||
| ) |
Set the mode of the encoder (48 or 96 counts per turn)
- Parameters
-
tim Timer handle mode Mode selection
◆ yggdrasil_ProfileCounter_GetFormattedPassedTime()
| C_LINKAGE void yggdrasil_ProfileCounter_GetFormattedPassedTime | ( | tim_t | tim, |
| char * | buffer, | ||
| size_t | size | ||
| ) |
Get the time passed time since the start.
- Parameters
-
tim Timer handle buffer String buffer size Buffer size
- Returns
- Passed time formatted as a string
◆ yggdrasil_ProfileCounter_GetFormattedTimeToOverflow()
| C_LINKAGE void yggdrasil_ProfileCounter_GetFormattedTimeToOverflow | ( | tim_t | tim, |
| char * | buffer, | ||
| size_t | size | ||
| ) |
Get the time to an overflow formatted as a string.
- Parameters
-
tim Timer handle buffer String buffer size Buffer size
- Returns
- Time to an overflow formatted as a string
◆ yggdrasil_ProfileCounter_GetPassedTime()
Get the time passed time since the start.
- Parameters
-
tim Timer handle
- Returns
- Passed time in a u64
◆ yggdrasil_ProfileCounter_GetTimeToOverflow()
Get the time to an overflow.
- Parameters
-
tim Timer handle
- Returns
- Time to an overflow in a u64
◆ yggdrasil_ProfileCounter_Reset()
Reset the counter to 0.
- Parameters
-
tim Timer handle
◆ yggdrasil_ProfileCounter_Start()
Start the counter.
- Parameters
-
tim Timer handle
◆ yggdrasil_ProfileCounter_Stop()
Stop the counter.
- Parameters
-
tim Timer handle
◆ yggdrasil_TIM_Channel_SetDutyCycle()
| C_LINKAGE bool yggdrasil_TIM_Channel_SetDutyCycle | ( | tim_channel_t | channel, |
| float | dutyCycle | ||
| ) |
Set the duty cycle as a float value.
- Parameters
-
channel Timer channel handle dutyCycle Duty cycle in % [0 100]
- Returns
- Success
◆ yggdrasil_TIM_Channel_SetPolarityHigh()
| C_LINKAGE bool yggdrasil_TIM_Channel_SetPolarityHigh | ( | tim_channel_t | channel, |
| bool | highActive | ||
| ) |
Start set pwm polarity.
- Parameters
-
channel Timer channel handle highActive Set channel to high active when true
- Returns
- Success
◆ yggdrasil_TIM_Channel_StartPwm()
| C_LINKAGE bool yggdrasil_TIM_Channel_StartPwm | ( | tim_channel_t | channel | ) |
Start PWM generation for the channel.
- Note
- A duty cycle should be set with setDuty()
- Parameters
-
channel Timer channel handle
- Returns
- Success
◆ yggdrasil_TIM_Channel_StopPwm()
| C_LINKAGE bool yggdrasil_TIM_Channel_StopPwm | ( | tim_channel_t | channel | ) |
Stop PWM generation for the channel.
- Note
- This function disables the counter when no PWM channel is active
- Parameters
-
channel Timer channel handle
- Returns
- Success
◆ yggdrasil_TIM_Deinit()
Timer deinitialization.
- Parameters
-
tim Timer handle
- Returns
- Success
◆ yggdrasil_TIM_Disable()
◆ yggdrasil_TIM_Enable()
◆ yggdrasil_TIM_GetCount()
Get the counter value.
- Parameters
-
tim Timer handle
- Returns
- Actual timer count
◆ yggdrasil_TIM_GetPwmFrequency()
Get the pwm frequency.
- Note
- The frequency is for all channels the same
- Parameters
-
tim Timer handle
- Returns
- Frequency in Hz
◆ yggdrasil_TIM_Init()
Timer initialization.
- Parameters
-
tim Timer handle
- Returns
- Success
◆ yggdrasil_TIM_ResetCount()
Reset the counter value.
- Parameters
-
tim Timer handle
◆ yggdrasil_TIM_SetCount()
Set the counter value.
- Parameters
-
tim Timer handle cnt New timer value
◆ yggdrasil_TIM_SetPwmFrequency()
Set the pwm frequency and (optional) the maximal ticks within on cycle for all channels.
- Note
- The actual duty cycle for all channels will be restored after the changes
- Implement a proper error handling, the function does not guarantee to be successful
- Parameters
-
tim Timer handle f_hz new frequency in hz resolution of the pwm, for 0 the actual value will be used
- Returns
- True when the adjustment was possible, false when the parameter did not match